
Tuesday, October 18, 2016
Changes Made to the Robot During Summer 2016
Coming back to STEM means continuing my build on my robot that will be competing with a couple others from our club this November 5th at a competition at Embry-Riddle. Until the start of the new STEM semester there was a fellow intern working on my robot that had joined the robotics club recently his name is Brian. He made some very nice changes to the robot one of the major ones by changing out the wheels to some very larger ones making the robot able to strafe (the ability to make the robot move side to side without moving up or down). This new addition to the robot will help us very much in the competition by saving us time. Instead of having to adjust the robot to knock over the stars on the wall in the center of the field, we can simply move the robot horizontally to be in the same distance away every time making the robot knock down these stars faster than our opponent giving us the upper hand in the beginning of the competition. I was working with the robot this past week and it seems the front two wheels are powered by a stronger motor/ high speed motor making the strafing uneven. This was a simple fix by making all the motors high speed making it a nice straight horizontal move. Brian is working on the second part of the competition which is being able to pick up and launch the stars over the bar which is a very difficult task but he will make it work. Below is how our wheels are set up to make the robot able to strafe. We make each wheel on both sides go opposite directions.

Thursday, October 6, 2016
New Semester at S-STEM Fall 2016 VEX STARSTRUCK
This is the first week back at STEM Fall 2016 and I've heard there's a lot of new people in the internship. I was unfortunately unable to attend the first mandatory meeting due to some car issues but hopefully I'm able to meet everyone or at least chat with them through our blogs and discussion boards.This internship is a great place to connect with students and faculty that are in similar fields as you are and really grow your circle that will aid you further in your career. This is going to be my third semester here at the STEM program and I'm thrilled to still be in this program. I've been working with Josh in robotics building robots and competing them in competitions throughout the year. I started working with robotics last semester and I'm hooked on them. I've heard there's a lot of new people in robotics as well, which is a whole separate club on its own, and I'm hoping to meet them soon. I was also here during the summer working on a new robot for a new VEX competition called STARSTRUCK if anyone is interested you should definitely look it up, it's like a giant game of jacks but with robots. The robot I'm working on will have to pick up giant stars and throw them over a wall to the opponents side which is pretty much the concept of the game. This all sounds very easy in words but having to plan and actually build a robot from scratch can be very tedious. Building robots takes a lot of patience because you have to keep adjusting the robot until it does its function every time flawlessly. Not only that but you the builder have to be confident in controlling the robot and knowing everything that it will do. This semester is going to be great I hope to meet all the STEM interns in the near future I wish you all the best of luck. Below is a picture of the playing field for VEX Starstruck.



Thursday, May 5, 2016
Tearing a Robot Down to Start Designing a New One
This week in the STEM program as the semester comes to an end so does my robot that I built this whole semester. I had to tear the robot apart that I worked so hard on this semester today and it was sad it hurt. It's funny how I worked hard building this robot this whole semester but I managed to pull it all apart in an hour. The reason for me having to start from scratch with a new design for a robot is because the next VEX robotics competition has totally changed. It's no longer shooting balls into goals but its picking up huge jacks and throwing them over a wall. My robot with the current design was not going to be able to perform the task and it was way too small. Now I will start brainstorming a design for this next competition to work on the next semester. The competition looks like a lot of fun and it's going to be a challenge to build this robot but I'll keep you guys updated. Here are some pictures of before and after of the robot tear down. You can see that yellow jack and the size of it in the picture. This next game will also have an orange square beanbag that you can toss over the wall which you can see a part of it next to Josh.




Friday, April 29, 2016
EMCC Student Conference Experience
This week at SSTEM most of the interns were at the Estrella Mountain Community College Student Conference Thursday the 28th. We had four posters including mine and two interns did oral presentation. The poster session went well I was nervous at first since presenting isn't my favorite but after a few minutes I wasn't nervous at all and the words just flowed out. It was great sharing my project with the judges and other students there at EMCC. The majority of them thought it was so cool doing a project of robots and I had a video of me driving my robot and actually scoring a goal. Although I didn't win this was a great experience and I took a lot away from it. Everybody did great with their posters and oral presentation. There were many student from all over with great projects as well that were very interesting. Congratulations to Oliver and Bethany who were able to win 3rd and 2nd place in the poster session great job. I also want to thank the mentors for being there for support Josh and Corri sorry if I spelled your name wrong. Awesome experience. Here's some pics of our posters.



Sunday, April 17, 2016
Friendly Robotics Competition so Far
This week we managed to do some of the test towards the competition of this semester with my robot against Lily's. The speed round we did by doing a 50 ft forward and back drag race down the hallway outside of the STEM room in E-224 I believe. We each had 3 runs to calculate an average run time for each of us. My average ended up being around 58 seconds and Lily's was over a minute I believe but I was able to beat her in the speed round. The next competition we did was the manual or driver control shooting round which is only one minute long. We each had 3 trials again to score as many balls as possible in the goals, but unfortunately I lost in the manual competition with only 11 points while Lily was able to score 20 points. Her robot's launcher shot really farther than mine and she had good accuracy. Another test that I did was the autonomous portion which is programming the robot to score the points on its own and I was able to get 11 points in 3 trials. Lily still hasn't done this part of the competition so my results and data are still pending but I'm hoping she doesn't beat me! After this last test we just need to weigh each one of our robots and calculate the total cost of each to have our data complete. Overall this was a really fun project and I enjoyed working with these robots so much.

Tuesday, April 5, 2016
It finally drives straight! Who will I be up against in the end?
This week in STEM I was able to fix a HUGE flaw that my robot had ever since it was able to move. That flaw was that whenever I drove my robot one of the motors was faster than the other so my robot would drive off to one side more than the other making it impossible to drive in a straight line. This made driving the robot a hassle and it took so much time away in trying to get to the balls and to get to the goals. Well this week after noticing that the program on the motors of the robot was not the issue I pulled off the two motors that move the back wheels and noticed that one of them was a high speed and the other was just a regular motor so after making it a high speed motor that fixed the problem. It was amazing seeing my robot drive straight and since I was used to driving it the other way I need to practice on the field to get the hang of it now, I'm sure this is going to help out a lot in terms of time and being able to score more points in that one minute period. Here's an image of exactly how I felt when I saw my robot drive in a straight line. I'm trying to upload a video of the robot driving not sure if it will upload though.

Thursday, March 31, 2016
The Need for Speed on Robotics
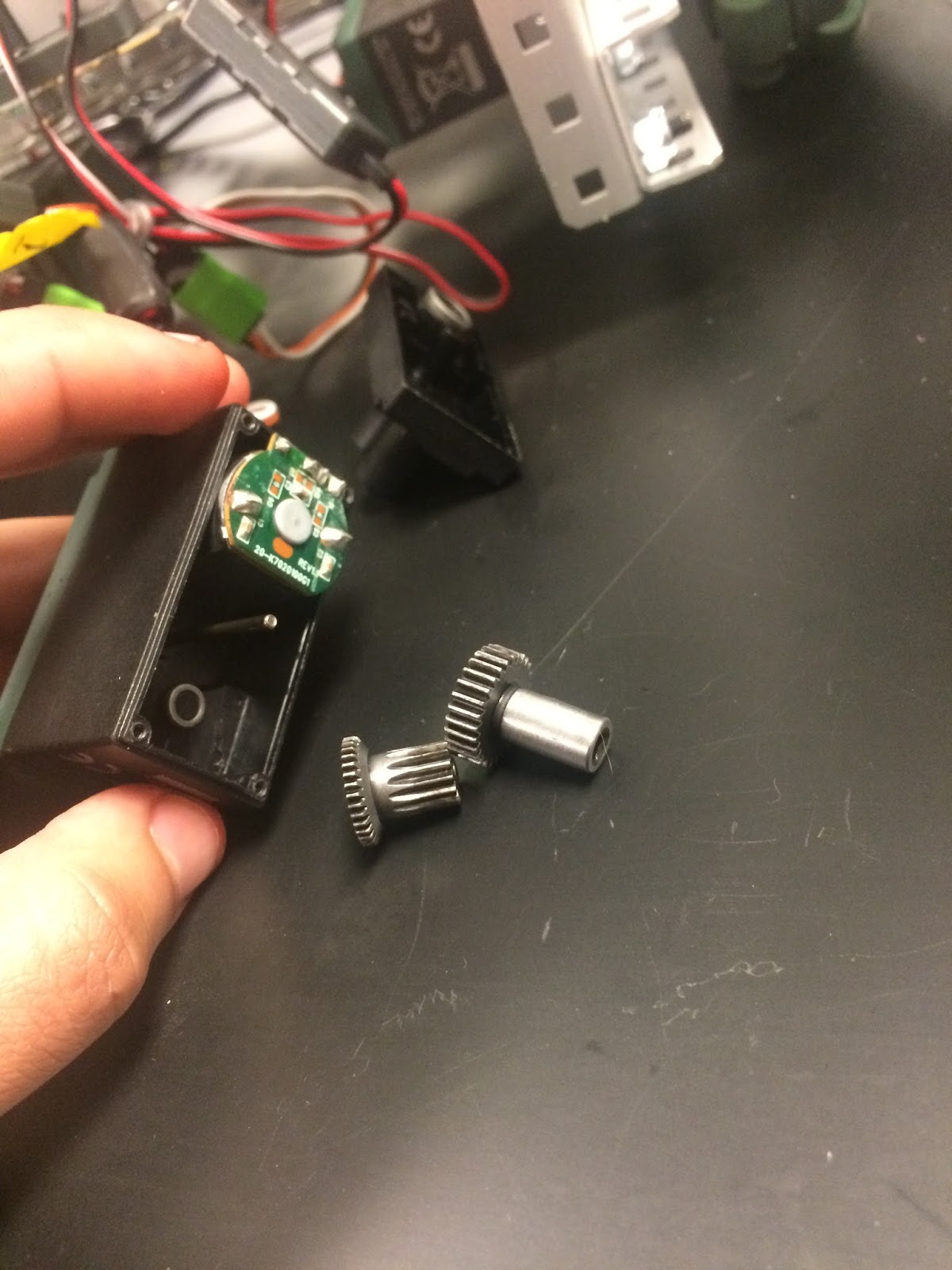
This week in STEM I've been working on making my robot faster. I've made my motors high speed by switching out the gears inside them. I'm having trouble scoring enough points during my one minute period that will be against a fellow STEM intern Lily. I have not been able to score on the high goal consistently and I struggle driving the robot and picking up the balls. The robot drives more towards one side when driving straight which makes driving take more time than it should and with only a minute to score as many points I need all the time I can get. This can be due to having different type of motors on each side or it can be the programming that was already on it. This project will not use any programming since the robots have to be controlled manually for the test. I have changed the flappers that pick up the balls to smaller ones hoping they don't cause as much friction on the ball when I shoot them out. I'll be working more on my robot this week and the competition is next week. Also everyone who got accepted to the Estrella Community College Student Conference good job and good luck! Here's a picture of the high speed gears that go in the motors and a picture of the bottom of my robot where these motors are located.



Thursday, March 24, 2016
Dual Motors for the Launcher
This week in STEM I'm continuing on working on my small 15 x 15 x 15 robot and making changes on it so that it can score more points. My small robot is going to be competing against Lily's much larger robot in test that will involve, speed, weight, cost, and ability to score by shooting balls into
goals while being controlled manually. I might have an upper hand in weight and possibly speed but outscoring a bigger robot might be a challenge since she will be able to score on the high goals of the field easier. To try and be able to score more high goals with ease I've added another motor to increase the speed of the rotation of the launcher wheels. Hopefully this can increase my chances of winning in the scoring round of the competition. Good luck Lily but I'm going to win! Here's some pictures of the motors that spin the wheels and a video of how fast the wheels spin now. Also there's a picture of the field we compete in to score goals.

Thursday, March 10, 2016
Nothing But Net Vex Competition at ASU
This week at the STEM internship we competed at the VEX nothing but net competition which was held at the ASU Tempe campus. There were a lot more people there than I expected even though most of them were affiliated with the middle and high school competition than ours. Either way it's nice to see that robotics is something that is growing in the interest of the youth. All the robots have to pass an inspection before they even are able to practice on the field and it turns out that my robot was about an inch too wide of the 15x15x15 requirement for a small robot. I had to move the entire gear portion of the robot over so it could fit the requirement which took some time. When it finally passed the inspection I started having some battery problems with the robot turning off on the field. With my robot not able to compete Lucas and Ainsley used their robots to compete in the beginning and they did great. Once the eliminating rounds started I was helping Ainsley load the balls into the robot and I drove Lily's small robot which had the main purpose of being picked up by the big robot. It was difficult driving her robot and getting it in position but I was able to get it there a couple of times. We ended up losing in the semifinals but against a very tough team from Colorado. The competition was a lot of fun even though my robot didn't compete I definitely want to go again and try and win first. Here's a video of me trying to score on the high goal with my robot but I wasn't able to.
Wednesday, March 2, 2016
VEX Robotics Competition This Weekend!
This week in my STEM internship I've been able to put my robot together with help from Josh and make it able to move, pick up a ball and actually shoot the ball. Although the shot isn't what we want yet that's where I'm at as of now on the robot. It's difficult to modify a robot when you're restricted to only 15 inches in length, width and height. I need to get the right angle, power and distance for the perfect shot to make the goals and score some points for our team. The VEX competition is this Saturday at the ASU Tempe campus and I'm really looking forward to it since it's going to be my first time at any type of VEX competition. I hope we do well and bring home 1st place, also anyone who is interested in going to support the PC team the event is free as well as parking. You should contact Amanda, Josh, or Matt for the details. Here are some pictures of how my robot looks like, it still needs some final touches before Saturday.




Front View

Side View

Rear View
Thursday, February 25, 2016
Started Building the New Small VEX Shooter Robot
This week in the S-STEM Program I started building my smaller shooter robot that has to be under 15 inches in length, width and height. I got my parts in this week that I ordered and started building the main chassis or the main frame of the robot. I got the 4 omnidirectional wheels on the chassis that make the robot able to move forwards and backwards and side to side. I also started on the part of the robot that looks like the path where the balls will be going into. This path I built will guide the balls up by a chain and several other parts to be shot out by one or two spinning wheels at the top. I still have a lot to finish this robot with the competition around the corner in a little over two weeks. I'm looking forward to getting my robot moving and shooting the balls in the goals. I'll keep you guys updated next week. Here's a couple of pictures of how the robot is looking so far.




Thursday, February 18, 2016
First Week back at S-STEM Program Spring 2016, Robotics Project


{kind=link}
{kind=link}
This was my first week back at the S-STEM program and it feels good to be back and meet some new people and scholars, along with the people I knew from my previous internship. My project is going to be based around VEX robotics which are robots that are built from scratch using materials (wheels, structural beams, motors, wires, gears, etc.) and are made to do a task or to compete against other robots. In my case there is a VEX competition upcoming in March 5th called Nothing but Net at ASU which is a competition where robots must pick up plastic balls and shoot them at goals and have to beat the other team's score. This semester I have to build two small robots with dimensions no bigger than 15x15x15 inches. My first robot that I've started already will be designed like a motorcycle and it's job is to ultimately be small enough to fit and drive up inside the larger robots pictured above to the right. The point of this robot is to get us 25-50 extra points to our score as long as it's 4-12 inches off the ground. The second small robot is going to be a small shooter robot based off the design below that will hopefully be able to score on the higher goals. My parts are ordered for my second robot and I should be able to start building next week. Wish me luck!

Subscribe to:
Posts (Atom)